 IMAGE Team - The Pantheon project
IMAGE Team - The Pantheon project
The goal of illumination correction is to remove uneven illumination of the image caused by sensor defaults (eg., vignetting), non uniform illumination of the scene, or orientation of the objects surface.
Illumination correction is based on background subtraction. This type of correction assumes the scene is composed of an homogeneous background and relatively small objects brighter or darker than the background. There are two major types of background subtraction techniques depending on whether the illumination model of the images can be given as additional images or not:
Note: the results presented in this section
are just meant to illustrate the effect of the various illumination
correction techniques.
The visual quality of this results, in terms of contrast or
brightness, can be improved afterwards
by using some image enhancement
techniques.
Prospective correction uses additional images obtained at the time
of image capture. Two types of additional images can be used: The corrected image g(x,y) is obtained using the following
transformation: where f(x,y) is the original image, d(x,y) is the dark
image, b(x,y) is the bright image, and C is a normalization
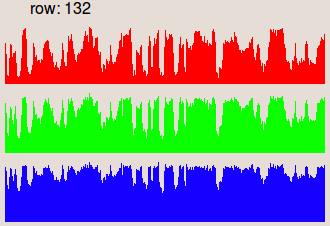
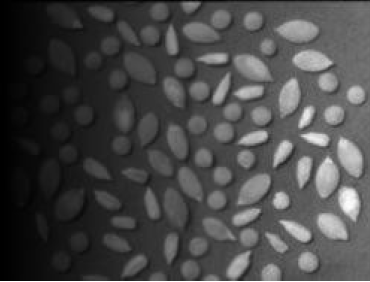
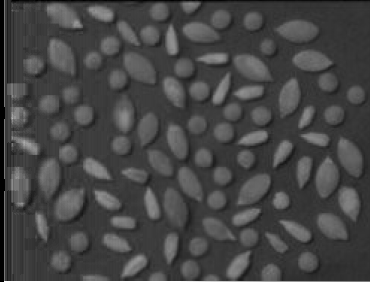
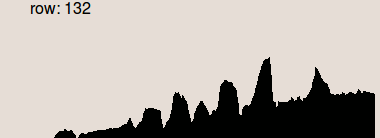
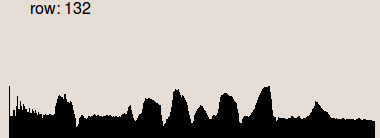
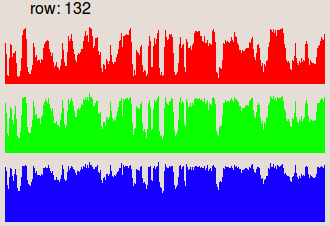
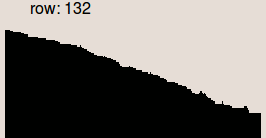
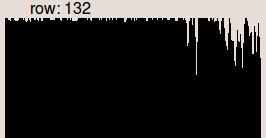
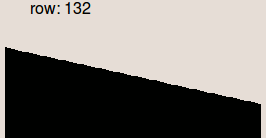
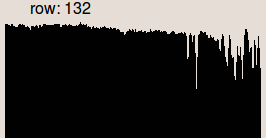
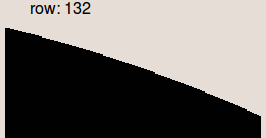
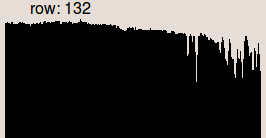
constant used to recover the original colors: where mean(i(x,y)) is the mean value of the image i(x,y). The images in the second row are the profiles of the row 132, where the gray
level values are represented as vertical bars. We notice that in the input image
the illumination is higher on the right side than on the left side.
This is corrected in the result image.I. Prospective correction
Note: It is always advantageous to capture several occurrences
of bright images and dark images in order to remove noise and attenuate
lighting defects. The model of each type of image is then the average of
these images:
dark = ∑ darki
bright = ∑ brighti
1. Correction from a Dark Image and a Bright Image
f(x,y) - d(x,y)
g(x,y) = --------------- .C
b(x,y) - d(x,y)
1
C = mean(f(x,y)) . ----------------------
f(x,y) - d(x,y)
mean( --------------- )
b(x,y) - d(x,y)
Pandore Script (bash)
psub serous.pan dark.pan tmp1.pan
psub bright.pan dark.pan tmp2.pan
pdiv tmp1.pan tmp2.pan tmp3.pan
pmeanvalue tmp3.pan c1.pan
pdivval c1.pan tmp3.pan tmp4.pan
pmeanvalue serous.pan c2.pan
pmultval c2.pan tmp4.pan output.pan
Results
 |
 |
 |
 |
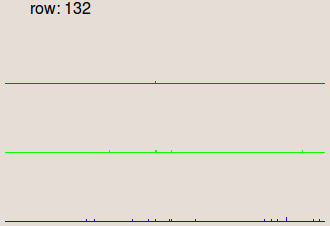
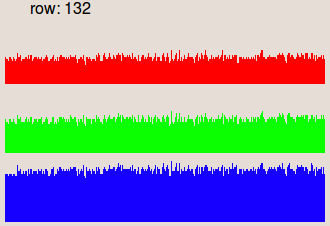
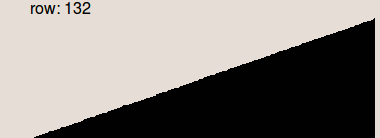
| Input image. | Dark image. | Bright image. | Corrected output image. |
 |
 |
 |
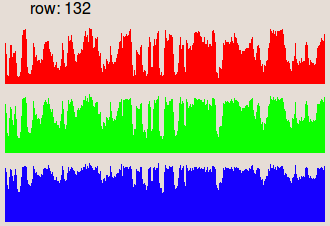 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
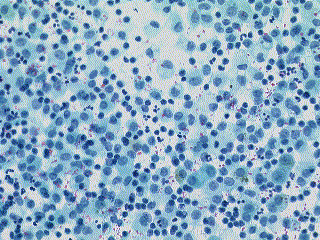
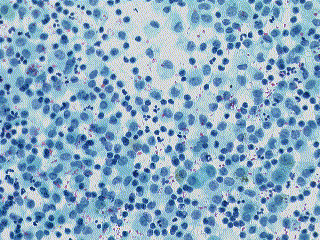
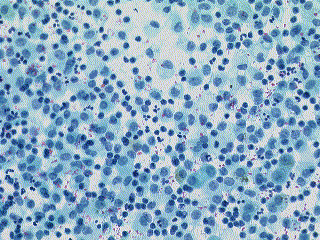
If only the bright image is available, the method uses division of the source image by the bright image if the image acquisition device is linear, or the subtraction of the source image with the bright if the acquisition device is logarithmic with a gamma of 1.
In case of a linear acquisition device, the corrected image g(x,y) is obtained using the following transformation:
f(x,y)
g(x,y) = ------ . C
b(x,y)
where f(x,y) is the original image, b(x,y) is the bright image, and C is a normalization constant that is used to recover the initial colors:
1
C = mean(f(x,y)) . ------------
f(x,y)
mean( ------ )
b(x,y)
where mean(i(x,y)) is the mean value of the image i(x,y).
pdiv grain.pan grain_background.pan tmp1.pan pmeanvalue grain.pan c1.col pmultval c1.col tmp1.pan tmp2.pan pmeanvalue tmp1.pan c2.col pdivval c2.col tmp2.pan grain_out.pan
 |
 |
 |
| Input image. | Background image. | Output image. |
 |
 |
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
If only the dark image is available, the method consists in subtraction of the dark image with the original image. The corrected image g(x,y) is then obtained using the following transformation:
g(x,y) = f(x,y) - d(x,y) + mean(d(x,y))
where f(x,y) is the original image, d(x,y) is the dark image and mean(d(x,y)) is the mean value of the dark image.
psub serous.pan dark.pan tmp1.pan pmeanvalue dark.pan c.col paddval c.col tmp1.pan out.pan
|
|
 |
| Input image. | Dark image. | Output image. |
|
|
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
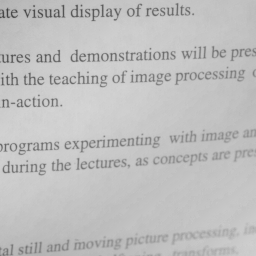
When additional image are not available, an ideal illumination model has to be estimated to define the bright image. Therefore, retrospective correction can use the same background subtraction method than the prospective correction with the estimated bright image.
There are different algorithms for estimating the bright image. All of them assume the scene background corresponds to the low frequencies and the objects to the high frequencies. The retrospective correction techniques consist in removing the objects from the background to build the bright image, and then apply the same techniques as the prospective correction.
The background is estimated by using a low-pass filtering with a
very large kernel. The background is then subtracted from the input
image to compensate the illumination.
The corrected image g(x,y) is obtained from the input image f(x,y) by:
g(x,y) = f(x,y) - LPF(f(x,y)) + mean(LPF(f(x,y)))
where LPF(f(x,y)) is the low-pass filtering of image f(x,y), and mean(LPF(f(x,y))) is the mean value of the low pass image.
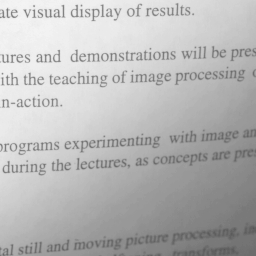
The following example uses the Gaussian filter with a kernel of size 20, greater than the size of the characters.
pgaussianfiltering 20 page.pan mask.pan psub page.pan mask.pan tmp.pan pmeanvalue mask.pan c.col paddval c.col tmp.pan out.pan
 |
 |
 |
| Input image. | Estimated background image. | Output image. |
 |
 |
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
The background is estimated by using homomorphic filtering with a low-pass filter. Homomorphic principle is to remove high frequencies (considered as reflectance) and keep the low frequencies (considered as illumination). The background is removed by highpass filtering the logarithm of the image and then taking the exponent (inverse logarithm) to restore the image.
The corrected image g(x,y) is obtained from the input image f(x,y) by:
g(x,y) = exp(LPF(log(f(x,y)))) . C
where LPF(f(x,y)) is the low-pass filter of f(x,y) and C is the normalization coefficient given by:
mean(f(x,y))
C = ----------------------------
f(x,y)
mean( --------------------- )
exp(LPF(log(f(x,y))))
where mean(i(x,y)) is the mean value of the image i(x,y).
The following example uses the Butterworth filter with a cutoff value of 3.
Note that this technique does not really yield accurate results.
cutin=0
# the less the cutoff value, the stronger filtering.
cutoff=3
order=2
homomorphicfiltering(){
paddcst 1 $1 i0.pan # The zero log problem
plog i0.pan i0.pan
psetcst 0 i0.pan i1.pan
pfft i0.pan i1.pan i2.pan i3.pan
pproperty 0 i2.pan
ncol2=`pstatus`
pproperty 1 i2.pan
nrow2=`pstatus`
pproperty 2 i2.pan
ndep2=`pstatus`
pbutterworthfilter $ncol2 $nrow2 $ndep2 0 $cutin $cutoff $order i4.pan
pmult i2.pan i4.pan i5.pan
pmult i3.pan i4.pan i6.pan
pifft i5.pan i6.pan i7.pan i8.pan
pproperty 0 $1
ncol1=`pstatus`
pproperty 1 $1
nrow1=`pstatus`
pproperty 2 $1
ndep1=`pstatus`
pextractsubimage 0 0 0 $ncol1 $nrow1 $ndep1 i7.pan i9.pan
pexp i9.pan i11.pan
paddcst -1 i11.pan i12.pan
pclipvalues 0 255 i12.pan i13.pan
pim2uc i13.pan $2
}
multiplicative-correction() {
pdiv $1 $2 i14.pan
pmeanvalue $1 col.pan; c1=`pstatus`
pmeanvalue i14.pan col.pan; c2=`pstatus`
c=`echo "scale = 1; $c1/$c2" | bc`
pmultcst $c i14.pan $3
}
pproperty 3 page.pan; bands=`pstatus`
if [ $bands -eq 1 ]
then
# grayscale image
homomorphicfiltering page.pan mask2.pan
multiplicative-correction page.pan mask2.pan out.pan
else
# color image
pimc2img 0 input1.pan r.pan
pimc2img 1 input1.pan g.pan
pimc2img 2 input1.pan b.pan
homomorphicfiltering r.pan maskr.pan
homomorphicfiltering g.pan maskg.pan
homomorphicfiltering b.pan maskb.pan
multiplicative-correction r.pan maskr.pan outr.pan
multiplicative-correction g.pan maskg.pan outg.pan
multiplicative-correction b.pan maskb.pan outb.pan
pimg2imc 0 outr.pan outg.pan outb.pan out.pan
fi
|
 |
 |
| Input image. | Estimated background image. | Output image. |
|
 |
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
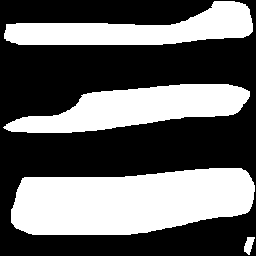
The background is estimated by mathematical morphology opening or closing. The estimated background is then subtracted from the original image. The total sequence of operations corresponds to a top hat of the image. Top hat removes high frequencies (considered as reflectance) and keeps low frequencies (considered as illumination). Black top hat is used for clear background and white top hat is used for dark background.
If the background is clear, the corrected image g(x,y) is obtained using:
g(x,y) = BTH[f(x,y)] + mean(closing(f(x,y))) g(x,y) = [f(x,y) - closing(f(x,y))] + mean(closing(f(x,y)))
where mean(closing(f(x,y))) is the mean value of the closed image.
The following example uses a disc structuring element with size 11, greater than the size of the objects (characters).
# black top hat pdilatation 2 5 page.pan b.pan perosion 2 5 b.pan mask3.pan psub page.pan mask3.pan tmp.pan # normalization pmeanvalue mask3.pan c.col paddval c.col tmp.pan out.pan
|
 |
 |
| Input image. | Estimated background image. | Output image. |
|
 |
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
The background is estimated by using orthogonal linear regression. The background is approximated by a plane, so it is not suitable for complex background.
The corrected image g(x,y) is obtained from the input image f(x,y) by:
g(x,y) = (f(x,y) - LR(f(x,y)) - mean(LR(f(x,y)))
where LR(f(x,y)) is the linear regression of f(x,y) in x and y, and mean(LR(f(x,y))) is the mean value of the linear regression image.
plinearregression page.pan mask4.pan psub page.pan mask4.pan tmp.pan pmeanvalue mask4.pan c.col paddval c.col tmp.pan out.pan
|
 |
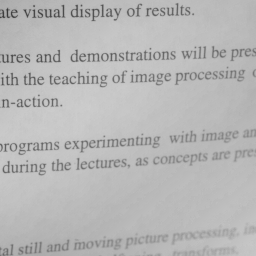 |
| Input image. | Estimated background image. | Output image. |
|
 |
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
The background is estimated from a least square fitting of a polynomial that approximates the background. The background is then subtracted from the input image to compensate the illumination. The corrected image g(x,y) is obtained from the input image f(x,y) by:
g(x,y) = (f(x,y) - b(f(x,y))) - mean(b(f(x,y)))
where b(f(x,y)) is a polynomial that approximates the background, and mean(b(f(x,y))) is the mean value of the polynomial image.
In the following examples, two types of polynomials has been used:
The first following example uses second-order polynomial. The operator needs a mask to select only background pixels. The mask defines the list of pixels that can be used to compute the polynomial approximation.
The order of the polynomial can be selected separately for x, y, and mixed terms. For example, with orders 2, 3, and 2 for x, y, and xy respectively, the polynomial will be:
a+b*x+c*x^2+d*y+e*y^2+f*y^3+g*xy
ppolynomialfitting 2 2 1 page.pan page_mask.pan mask5.pan psub page.pan mask5.pan tmp.pan pmeanvalue mask5.pan c.col paddval c.col tmp.pan out.pan
|
 |
 |
 |
| Input image. | Mask image. | Estimated background image. | Output image. |
|
. |  |
 |
| Profile of the row 132. | . | Profile of the row 132. | Profile of the row 132. |
The second following example uses Legendre polynomial. This technique uses the orthogonality relation of the Legendre polynomials to expand an image as a double sum of those functions. The sum is then evaluated to produce an image that approximates a projection onto the space of polynomial images.
plegendrepolynomialfitting 2 2 page.pan mask6.pan psub page.pan mask6.pan tmp.pan pmeanvalue mask6.pan c.col paddval c.col tmp.pan out.pan
|
 |
 |
| Input image. | Estimated background image. | Output image. |
|
 |
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
The previous methods cannot be applied per se to color images because they used channel-wise processing and thus alter the spectral composition of colors (creation of new colors).
The solution is to convert the image into the HSL color space and applied the correction to the lightness channel.
The example provided below uses the morphological approach of the correction.
prgb2hsl whiteboard.pan data1.pan pgetband 0 data1.pan data44.pan pgetband 1 data1.pan data45.pan pgetband 2 data1.pan data36.pan pdilatation 1 5 data36.pan data37.pan perosion 1 5 data37.pan data38.pan pmeanvalue data38.pan data41.pan psub data36.pan data38.pan data40.pan paddval data41.pan data40.pan data42.pan pimg2imc 4 data44.pan data45.pan data42.pan data43.pan phsl2rgb data43.pan out7.pan
 |
 |
 |
| Input image. | Estimated background image. | Output image. |
 |
 |
 |
| Profile of the row 132. | Profile of the row 132. | Profile of the row 132. |
John C. Russ, "The image processing handbook, Fifth edition", CRC Press, 2006.