 Équipe IMAGE - Le projet Pantheon
Équipe IMAGE - Le projet Pantheon
Le but de la correction de l'illumination est de supprimer l'hétérogénéité spatiale de l'illumination d'une image causée soit par les défauts du capteur (eg., vignetage), par une illumination non uniforme de la scène, ou par l'orientation de la surface des objets.
La correction de l'illumination est basée sur la soustraction du fond. Ce type de correction suppose que la scène est composée d'un fond homogène et des objets relativement petits et plus clairs ou plus sombres que le fond. Il y a deux techniques de soustraction de fond qui dépendent du fait que le modèle d'illumination de l'image peut être donné par des images supplémentaires ou non :
Remarque : Les résultats présentés dans cette section
sont utilisés pour illustrer les effets des différentes techniques
de correction de l'illumination.
La qualité visuelle des résultats, en termes de contraste ou d'éclairage
peut être améliorée par la suite en utilisant des techniques
d'amélioration d'images.
La correction prospective utilise des images additionnelles
obtenues au moment de l'acquisition de l'image à traiter.
Deux types d'images additionnelles peuvent être acquises : L'image corrigée g(x,y) est obtenue en utilisant la transformation
suivante : où f(x,y) est l'image originale, d(x,y) est l'image noire,
b(x,y) est l'image blanche, et C est la constante de normalisation qui permet de recouvrer
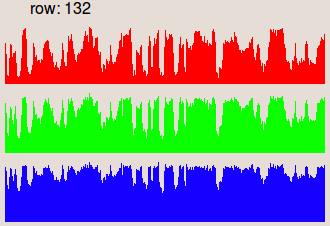
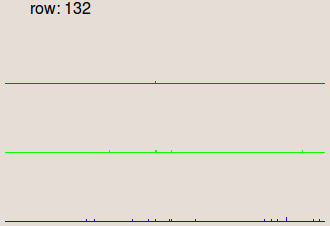
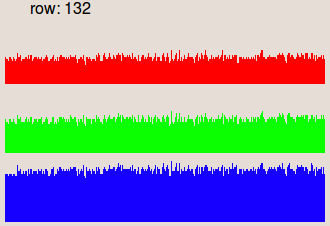
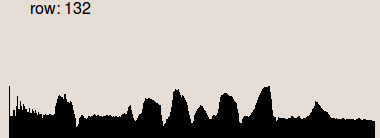
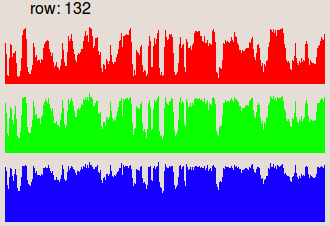
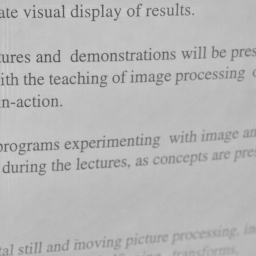
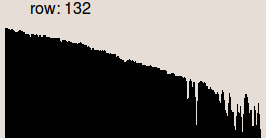
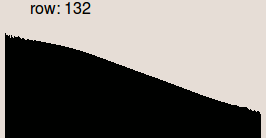
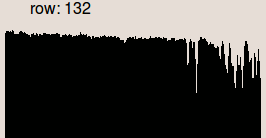
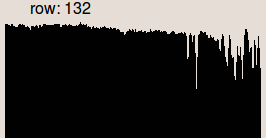
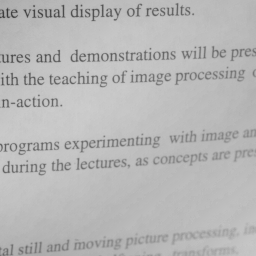
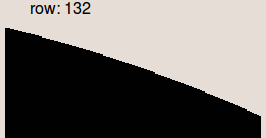
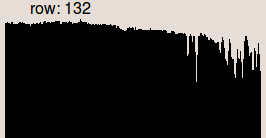
les couleurs de l'image originale : avec mean(i(x,y)) la valeur moyenne de l'image i(x,y). Les images sur la seconde ligne représentent les profils de la ligne 132,
où les niveaux de gris sont présentés sous la forme de barres verticales.
On peut constater sur l'image originale que l'éclairage est plus faible
à gauche qu'à droite. Ce défaut a été corrigé sur l'image résultat.I. Correction prospective
Remarque : Il est toujours avantageux de capturer plusieurs
occurrences de l'image blanche et noire dans le but d'atténuer le bruit
et les défauts d'éclairage. Le modèle de chaque type d'image
est ensuite obtenu par moyennage de ces occurrences :
dark = ∑ darki
bright = ∑ brighti
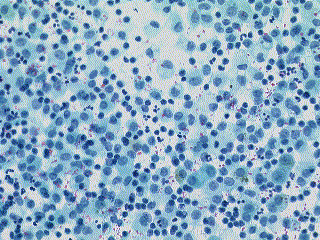
1. Correction à l'aide des images noire et blanche
f(x,y) - d(x,y)
g(x,y) = --------------- .C
b(x,y) - d(x,y)
1
C = mean(f(x,y)) . ----------------------
f(x,y) - d(x,y)
mean( --------------- )
b(x,y) - d(x,y)
Script Pandore (bash)
psub serous.pan dark.pan tmp1.pan
psub bright.pan dark.pan tmp2.pan
pdiv tmp1.pan tmp2.pan tmp3.pan
pmeanvalue tmp3.pan c1.pan
pdivval c1.pan tmp3.pan tmp4.pan
pmeanvalue serous.pan c2.pan
pmultval c2.pan tmp4.pan output.pan
Résultat
 |
 |
 |
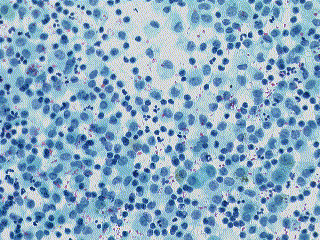 |
| Image originale. | Image noire. | Image blanche. | image résultat corrigée. |
 |
 |
 |
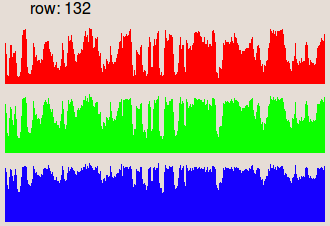 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
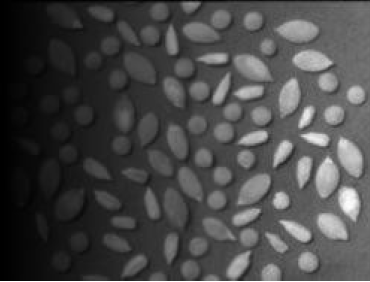
Si seule l'image blanche existe, la méthode utilise une division de l'image source avec l'image blanche si le capteur est linéaire, ou une soustraction de l'image source avec l'image blanche si le capteur est logarithmique avec un gamma de 1.
Dans le cas d'un capteur d'acquisition linéaire, l'image corrigé g(x,y) est obtenue en utilisant la transformation suivante :
f(x,y)
g(x,y) = ------ . C
b(x,y)
où f(x,y) est l'image originale, b(x,y) est l'image blanche, et C la constante de normalisation qui permet de recouvrer les couleurs de l'image originale :
1
C = mean(f(x,y)) . ------------
f(x,y)
mean( ------ )
b(x,y)
où mean(i(x,y)) est la valeur moyenne de l'image i(x,y).
pdiv grain.pan grain_background.pan tmp1.pan pmeanvalue grain.pan c1.col pmultval c1.col tmp1.pan tmp2.pan pmeanvalue tmp1.pan c2.col pdivval c2.col tmp2.pan grain_out.pan
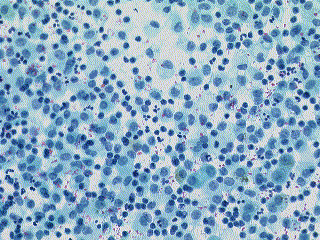
L'effet d'éclairage est plus prononcé à gauche qu'à droite.
 |
 |
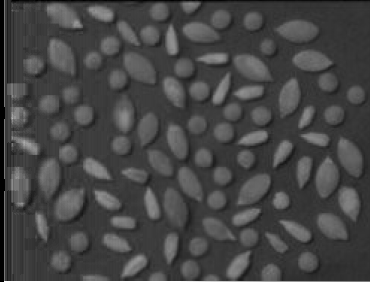 |
| Image originale. | Background image. | Image résultat. |
 |
 |
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
Si seule l'image noire existe, la méthode consiste à soustraire l'image noire de l'image originale. Le but est de corriger un défaut lié au capteur. L'image corrigée g(x,y) est alors obtenue en utilisant la transformation suivante :
g(x,y) = f(x,y) - d(x,y) + mean(d(x,y))
où f(x,y) est l'image originale, d(x,y) est l'image noire et mean(d(x,y)) est la valeur moyenne de l'image noire.
psub serous.pan dark.pan tmp1.pan pmeanvalue dark.pan c.col paddval c.col tmp1.pan out.pan
|
|
 |
| Image originale. | Dark image. | Image résultat. |
|
|
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
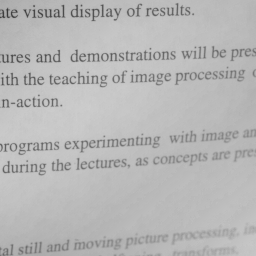
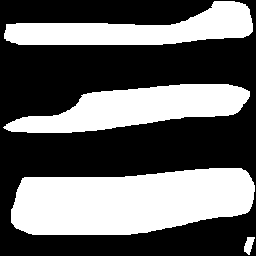
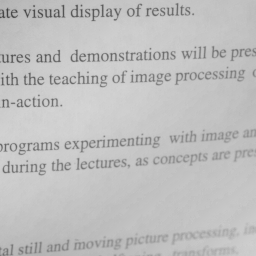
Quand les images additionnelles ne sont pas disponibles, un modèle idéal de l'illumination doit être estimé pour construire l'image blanche. La correction rétrospective utilise alors la même technique de suppression du fond que la correction prospective en utilisant cette image blanche estimée.
Il y a différentes techniques pour estimer l'image blanche. Toutes supposent que les objets correspondent aux hautes fréquences et le fond de la scène aux basses fréquences. La correction rétrospective consiste à supprimer les objets du fond pour construire l'image blanche puis à appliquer la même technique que la correction prospective.
Le fond d'image est estimé par un filtre passe-bas de grande taille.
Le fond estimé est ensuite soustrait de l'image initiale pour compenser
le défaut d'illumination.
L'image corrigée g(x,y) est obtenue à partir de l'image initiale f(x,y) par :
g(x,y) = (f(x,y) - LPF(f(x,y))) + mean(LPF(f(x,y)))
où LPF(f(x,y)) est l'image filtrée et mean(LPF(f(x,y))) est la moyenne des valeurs des pixels de l'image filtrée.
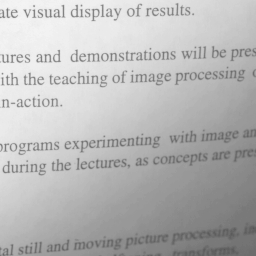
L'exemple utilise un filtre gaussien de taille 20, supérieure à la taille des objets (ici les caractères).
pgaussianfiltering 20 page.pan mask.pan psub page.pan mask.pan tmp.pan pmeanvalue mask.pan c.col paddval c.col tmp.pan out.pan
 |
 |
 |
| Image originale. | Image du fond estimé. | Image résultat. |
 |
 |
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
Le fond d'image est estimé par un filtre homomorphique passe-bas. Le principe du filtrage homomorphique est de supprimer les hautes-fréquences (considérées comme la réflectance) et de garder les basses-fréquences (considérées comme l'illumination). Le fond est supprimé par un filtrage passe-haut du logarithme de l'image puis en prenant l'exponentiel pour restaurer l'image.
L'image corrigée g(x,y) est obtenue à partir d'image initiale f(x,y) par :
g(x,y) = exp(LPF(log(f(x,y)))) . C
où LPF(i(x,y)) est l'image i(x,y) filtrée par un filtre passe-bas et C est le coefficient de normalisation donné par :
mean(f(x,y))
C = ----------------------------
f(x,y)
mean( --------------------- )
exp(LPF(log(f(x,y))))
où mean(i(x,y)) est la valeur moyenne de l'image i(x,y).
L'exemple suivant utilise le filtre de Butterworth avec une valeur de coupure de 3.
Il faut noter que cette technique n'est pas très efficace pour corriger les défauts d'illumination.
cutin=0
# the less the cutoff value, the stronger filtering.
cutoff=3
order=2
homomorphicfiltering(){
paddcst 1 $1 i0.pan # The zero log problem
plog i0.pan i0.pan
psetcst 0 i0.pan i1.pan
pfft i0.pan i1.pan i2.pan i3.pan
pproperty 0 i2.pan
ncol2=`pstatus`
pproperty 1 i2.pan
nrow2=`pstatus`
pproperty 2 i2.pan
ndep2=`pstatus`
pbutterworthfilter $ncol2 $nrow2 $ndep2 0 $cutin $cutoff $order i4.pan
pmult i2.pan i4.pan i5.pan
pmult i3.pan i4.pan i6.pan
pifft i5.pan i6.pan i7.pan i8.pan
pproperty 0 $1
ncol1=`pstatus`
pproperty 1 $1
nrow1=`pstatus`
pproperty 2 $1
ndep1=`pstatus`
pextractsubimage 0 0 0 $ncol1 $nrow1 $ndep1 i7.pan i9.pan
pexp i9.pan i11.pan
paddcst -1 i11.pan i12.pan
pclipvalues 0 255 i12.pan i13.pan
pim2uc i13.pan $2
}
multiplicative-correction() {
pdiv $1 $2 i14.pan
pmeanvalue $1 col.pan; c1=`pstatus`
pmeanvalue i14.pan col.pan; c2=`pstatus`
c=`echo "scale = 1; $c1/$c2" | bc`
pmultcst $c i14.pan $3
}
pproperty 3 page.pan; bands=`pstatus`
if [ $bands -eq 1 ]
then
# grayscale image
homomorphicfiltering page.pan mask2.pan
multiplicative-correction page.pan mask2.pan out.pan
else
# color image
pimc2img 0 input1.pan r.pan
pimc2img 1 input1.pan g.pan
pimc2img 2 input1.pan b.pan
homomorphicfiltering r.pan maskr.pan
homomorphicfiltering g.pan maskg.pan
homomorphicfiltering b.pan maskb.pan
multiplicative-correction r.pan maskr.pan outr.pan
multiplicative-correction g.pan maskg.pan outg.pan
multiplicative-correction b.pan maskb.pan outb.pan
pimg2imc 0 outr.pan outg.pan outb.pan out.pan
fi
|
 |
 |
| Image originale. | Image du fond estimé. | Image résultat. |
|
 |
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
Le fond d'image est estimé par application de filtres de fermeture ou d'ouverture issues de la morphologie mathématique. Le fond estimé est ensuite soustrait de l'image initiale. La séquence d'opérations correspond à l'application d'un chapeau haut-de-forme sur l'image. Le chapeau haut-de-forme supprime les hautes fréquences (considérées comme la réflectance) et garde les faibles fréquences (considérées comme l'illumination). Le chapeau haut-de-forme noir est adapté à un fond clair et le chapeau haut-de-forme blanc est adapté à un fond sombre.
Si le fond est plus clair qur les objets, l'image corrigée g(x,y) est obtenue par :
g(x,y) = BTH[f(x,y)] + mean(closing(f(x,y))) g(x,y) = [f(x,y) - closing(f(x,y))] + mean(closing(f(x,y)))
où mean(closing(f(x,y))) est la moyenne des niveaux de gris de l'image résultant de la fermeture.
L'exemple suivant utilise un élément structurant de type disque de taille 11 supérieure à la taille des objets (ici les caractères).
# black top hat pdilatation 2 5 page.pan b.pan perosion 2 5 b.pan mask3.pan psub page.pan mask3.pan tmp.pan # normalization pmeanvalue mask3.pan c.col paddval c.col tmp.pan out.pan
|
 |
 |
| Image originale. | Image du fond estimé. | Image résultat. |
|
 |
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
Cette technique permet d'approximer le fond de la scène par un plan en utilisant une régression linéaire orthogonale. Le fond est approximé par un plan, donc la technique n'est pas très adaptée à un fond complexe.
L'image corrigée g(x,y) est obtenue à partir de l'image initiale f(x,y) par :
g(x,y) = (f(x,y) - LR(f(x,y)) - mean(LR(f(x,y)))
où LR(f(x,y)) est l'image obtenue par régression linéaire en x et y de f(x,y), et mean(LR(f(x,y))) est la valeur moyenne de cette image.
plinearregression page.pan mask4.pan psub page.pan mask4.pan tmp.pan pmeanvalue mask4.pan c.col paddval c.col tmp.pan out.pan
|
 |
 |
| Image originale. | Image du fond estimé. | Image résultat. |
|
 |
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
Le fond d'image est approximé par un polynôme obtenu à l'aide des moindres carrés. Le fond est ensuite soustrait de l'image initiale pour compenser l'illumination. L'image corrigée g(x,y) est obtenue à partir de l'image initiale f(x,y) par :
g(x,y) = (f(x,y) - b(f(x,y))) - mean(b(f(x,y)))
où b(f(x,y)) est l'image obtenue à partir de l'approximation polygonale du fond d'image, et mean(b(f(x,y))) est la valeur moyenne de l'image du polynôme.
L'approximation polygonale consiste à approximer une fonction à partir d'un nombre de points ((x,y), f(x,y)) par un polynôme d'un degré choisi et qui passe par tous les points. Dans les exemples suivants, deux types de polynômes ont été utilisés :
Le premier exemple suivant utilise un polynôme de second ordre. L'opérateur nécessite un masque pour sélectionner les pixels qui appartiennent au fond. Le masque définit la liste des pixels du fond qui sont utilisés pour calculer les valeurs du polynôme.
L'ordre des termes du polynôme peut être sélectionné différemment pour x, y et les termes mixtes. Par exemple, avec l'ordre 2, 3 pour x, y, et l'ordre 2 pour xy, le polynôme devient :
a+b*x+c*x^2+d*y+e*y^2+f*y^3+g*xy
ppolynomialfitting 2 2 1 page.pan page_mask.pan mask5.pan psub page.pan mask5.pan tmp.pan pmeanvalue mask5.pan c.col paddval c.col tmp.pan out.pan
|
 |
 |
 |
| Image originale. | Image masque. | Image du fond estimé. | Image résultat. |
|
. |  |
 |
| Profil de la ligne 132. | . | Profil de la ligne 132. | Profil de la ligne 132. |
Le second exemple utilise un polynôme de Legendre. Cette technique utilise la relation d'orthogonalité des polynômes de Legendre pour étendre une image comme une double somme de ces fonctions. La somme est ensuite évaluée pour produire une image qui approxime une projection dans l'espace de l'image de polynôme.
plegendrepolynomialfitting 2 2 page.pan mask6.pan psub page.pan mask6.pan tmp.pan pmeanvalue mask6.pan c.col paddval c.col tmp.pan out.pan
|
 |
 |
| Image originale. | Image du fond estimé. | Image résultat. |
|
 |
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
Les méthodes présentées précédemment ne s'appliquent pas telles que aux images couleur parce qu'elles utilisent des opérations bandes par bandes et donc altèrent les couleurs (création de nouvelles couleurs).
La solution est de convertir l'image dans l'espace couleur HSL puis d'appliquer les corrections précédentes sur la bande correspondant à la luminosité.
L'exemple fournit ci-dessous utilise l'approche morphologique de la correction.
prgb2hsl whiteboard.pan data1.pan pgetband 0 data1.pan data44.pan pgetband 1 data1.pan data45.pan pgetband 2 data1.pan data36.pan pdilatation 1 5 data36.pan data37.pan perosion 1 5 data37.pan data38.pan pmeanvalue data38.pan data41.pan psub data36.pan data38.pan data40.pan paddval data41.pan data40.pan data42.pan pimg2imc 4 data44.pan data45.pan data42.pan data43.pan phsl2rgb data43.pan out7.pan
 |
 |
 |
| Image originale. | Image du fond estimé. | Image résultat. |
 |
 |
 |
| Profil de la ligne 132. | Profil de la ligne 132. | Profil de la ligne 132. |
John C. Russ, "The image processing handbook, Fifth edition", CRC Press, 2006.